Газета «КоммерсантЪ» в рамках «Ъ-Науки» опубликовала обстоятельное интервью Елизаветы Певной со светочем современной российской интеллектуальной робототехники Александром Пановым. Судя по комплиментарному заголовку «Отличается умом и сообразительностью» (ссылка), Александр произвёл должное впечатление на корреспондента. Он доходчиво разъяснил, чем робот отличается от стиральной машины, зачем его нужно постоянно чему-то обучать, и каким образом коллектив специалистов из ФИЦ ИУ РАН, Центра когнитивного моделирования МФТИ и AIRI внедряет подходы на основе ИИ.
Кроме размышлений о направлениях собственных исследований, учёный не обошёл стороной перспективы развития и внедрения автономных роботов на производстве и в быту. Однако заострить внимание решили всё-таки на текущем моменте, а именно на главных научных конференциях, которые Александр ежегодно посещает и увлекательно освещает в своём блоге. Особое внимание уделили октябрьской конференции IROS 2025 в китайском городе Ханчжоу. Слыханное ли дело, ведь на неё поедет рекордное для соотечественников количество статей: целых шесть, да ещё каких! Давайте уж сделаем краткий обзор заодно.
![]()
Это, прежде всего, большой коллективный труд LERa: Replanning with Visual Feedback in Instruction Following (ссылка), где авторы демонстрируют новую архитектуру для обнаружения неуспешно выполняемых действий и адаптивного перепланирования с учётом визуальной обратной связи в моделях VLA (vision—language—action). В то же время Адитья Нарендра, Дмитрий Макаров и Александр Панов предложили быстрый мультизадачный алгоритм обучения с подкреплением M3PO: Massively Multi-Task Model-Based Policy Optimization (ссылка) на основе модели мира для обучения компактных с точки зрения количества параметров стратегий.
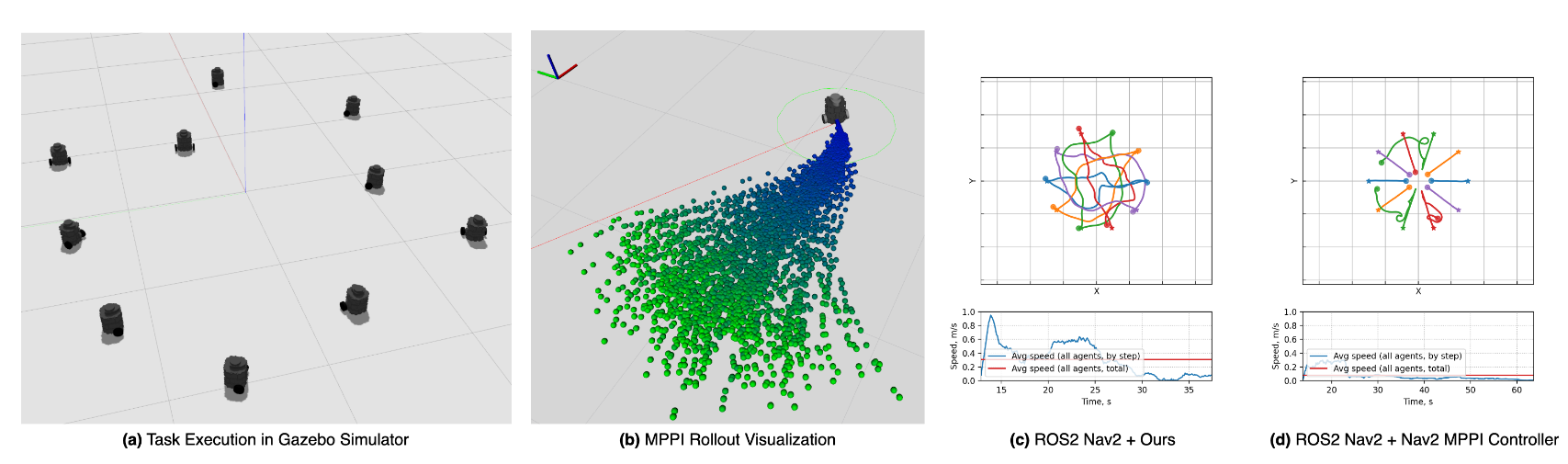
Степан Дергачёв и Константин Яковлев повезут свой новый метод Decentralized Uncertainty-Aware Multi-Agent Collision Avoidance With Model Predictive Path Integral (ссылка) избегания столкновений на базе MPPI и оценки неопределенности с экспериментами в симуляторе Gazebo. Кстати, вы можете наглядно оценить его способности. А для решения проблемы неявных ограничений при построении планов языковыми моделями Данил Григорьев, Алексей Ковалёв и Александр Панов создали подход нейросимвольной интеграции VeiftyLLM: LLM-Based Pre-Execution Task Plan Verification for Robots (ссылка).
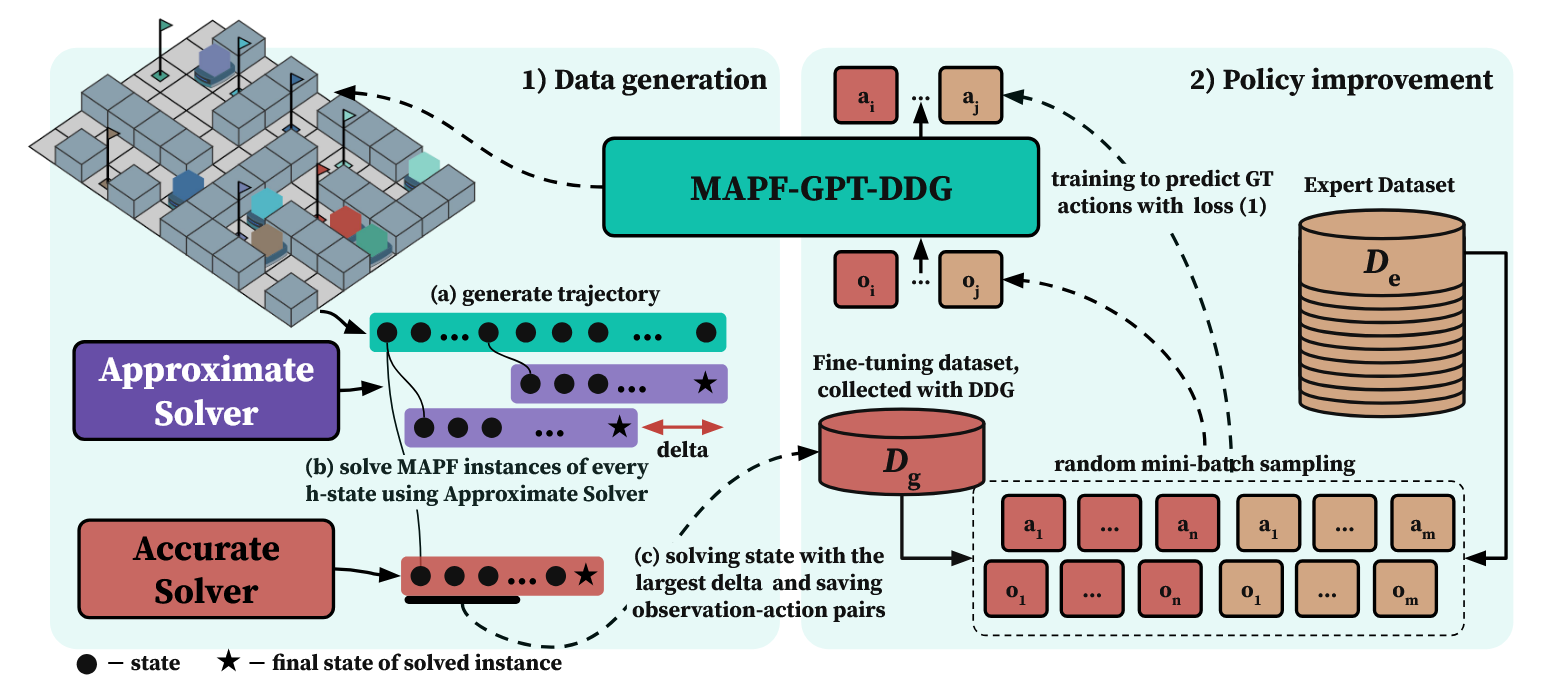
Наконец, Константин с Александром, а также Антон Андрейчук и Алексей Скрынник решили продолжить доброе дело MAPF-GPT, с которого и начался этот рабочий год на AAAI 2025, и дообучили его для задач мультиагентного поиска пути в режиме активного обучения. Впервые им удалось довести количество агентов в едином пространстве до 1 миллиона! О чём вы узнаете из Advancing Learnable Multi-Agent Pathfinding Solvers with Active Fine-Tuning (ссылка). И, разумеется, на IROS выдвигается тяжеловес PRISM-TopoMap: Online Topological Mapping With Place Recognition and Scan Matching (ссылка), о котором мы уже неоднократно писали.
Можно бесконечно говорить о роботах, но лучше предоставим это профессионалам. Всего пара месяцев осталась до октября. А пока есть возможность подогреть любопытство чтением таких вот классных интервью. Читайте, это интересно!
Cсылки по теме: