
71-й отдел ФИЦ ИУ РАН передаёт привет из столицы Мексики! 14–18 октября в Мехико прошла Международная конференция по интерактивной коллаборативной робототехнике ICR 2024, в которой традиционно принимали участие сотрудники Института проблем искусственного интеллекта. В этом году организаторами выступили Санкт-Петербургский Федеральный исследовательский центр Российской академии наук и Национальный автономный университет Мексики. Не обошлось и без наших учёных с Константином Яковлевым во главе.
Два доклада в основном треке Константин подготовил совместно с Кириллом Муравьёвым и Степаном Дергачёвым: «NavTopo: Использование топологических карт для автономной навигации мобильного робота» (ссылка) и «Децентрализованная немаркированная мультиагентная навигация в непрерывном пространстве» (ссылка). Метод NavTopo позволяет сопоставлять данные, полученные с датчиков робота, в режиме реального времени, тогда как подход DEC-UNAV даёт возможность агентам индивидуально выбирать цели, обмениваться ими, планировать путь и на каждом шаге выбирать действия, соблюдающие баланс между продвижением и обходом препятствий.
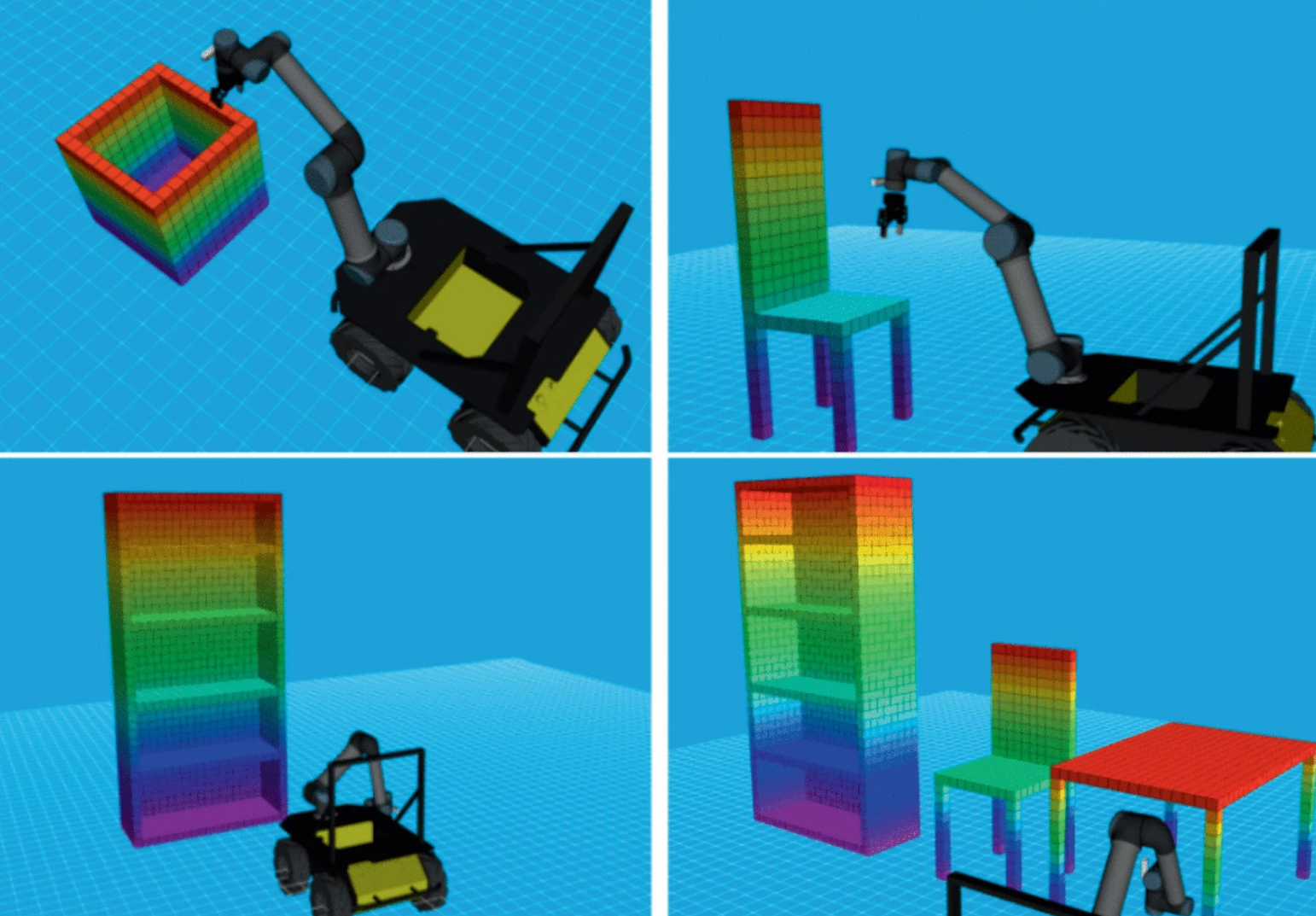
Ещё одну презентацию — «Стабилизация траектории манипулятора за счёт оптимизации осведомлённости о столкновении» (ссылка) на основе библиотеки Octomap — представили Елена Рублёва, Константин Миронов и Александр Панов. Результаты исследований лежат в открытом доступе в журнале публикаций Springer Nature, с графиками, комментариями и прочими бонусами. Мы же продолжаем пристально следить за перемещениями коллег по карте искусственного интеллекта.
Cсылки по теме: