
На этой неделе Институт проблем управления имени В. А. Трапезникова с размахом отмечал свой 85-й День рождения. Заложенный буквально накануне Великой Отечественной войны выдающимся учёным Виктором Кулебакиным, он успешно пережил и военную, и постперестроечную пору. Учёные ИПУ РАН участвовали в создании первых магнитных усилителей, космических спутников и атомных подлодок, а в 2000-х годах активно включились в процесс развития систем ИИ. Иначе как побратимами мы их назвать не можем. ФИЦ «Информатика и управление» с радостью примкнул к хору поздравителей, и не только на словах.
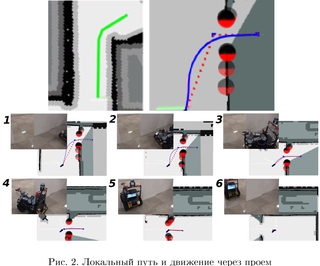
На прошедшем 17–20 июня XIV Всероссийском совещании по проблемам управления ВСПУ-2024, посвящённом юбилею, сотрудники 71 отдела Института проблем искусственного интеллекта и Центра когнитивного моделирования МФТИ подарили коллегам сразу четыре доклада на любой случай жизни. Например, Кирилл Муравьёв, Алхаддад Мухаммад и Александр Панов в рамках секции «Мехатроника, робототехнические системы и комплексы 2. Робофутбол и другие соревнования роботов» (оцените разброс тем!) поведали об «Иерархической навигации с избеганием препятствий и прохождением проёмов на четырёхколёсном мобильном роботе» (ссылка) — а именно о трёхуровневом подходе к навигации робота-праздника Хаски до фиксированной точки.
Алгоритм глобального планирования пути по карте, построение локальной траектории и генерация управляющих воздействий — вот они, три кита. Благодаря синтезу быстрого планирования и точного избегания препятствий методами оптимального управления, Хаски идеально преодолевает трассу, в том числе и узкие проёмы. Слава Хаски! А Михаил Дмитриев и Дмитрий Макаров подготовили собственный «Алгоритм построения численной асимптотики к решениям одного класса нелинейных сингулярно возмущённых задач управления» с помощью подхода SDRE (ссылка) для секции «Нелинейные системы». Он базируется на использовании сходящихся итерационных процессов в различных задачах управления и оптимизации с малым параметром, где можно строить формальный ряд по параметру, каждый член которого есть некоторая численная реализация в узлах сетки по независимой переменной.
С этой целью авторы ввели понятие численной асимптотики. Особенно они выделили возможность выстраивать приближения к точным решениям на основе сходящегося итерационного процесса, найденного при заданном значении параметра, причём без построения вспомогательных задач для определения членов асимптотического разложения. Однако квинтэссенцией признания в любви ИПИИ ИПУ стали сразу две презентации Константина Яковлева одновременно в двух секциях: «Методы эвристического поиска и случайного семплирования для планирования траектории многозвенного манипулятора» (ссылка) для «Мехатроники, робототехнических систем и комплексов 1» и «Применение управления с прогнозирующими моделями и стохастической оптимизацией в задаче децентрализованного много-агентного избегания столкновений» (ссылка) для «Робофутбола...» (ну, дальше вы знаете).
Для первой Константин с Александром Онегиным и Нураддином Керимовым взяли и сравнили два наиболее часто используемых подхода к решению задачи планирования траектории многозвенного манипулятора в пространстве с препятствиями: алгоритмы на основе поиска (А*) и алгоритмы на основе случайной выборки (RRT). А* подходит для манипуляторов с малым числом звеньев и для манипуляторов, у которых будет много узких мест в препятствиях при эксплуатации, RRT — для манипуляторов с большим количеством степеней свободы при отсутствии слишком узких коридоров в рабочем и конфигурационном пространстве. Впрочем, последние графики отсылают нас к задаче децентрализованного многоагентного избегания столкновений — а о ней ниже, ведь...
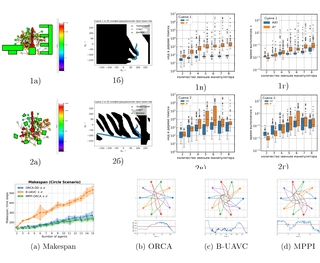
...Константин Яковлев и Степан Дергачёв совсем распоясались и разработали новый подход на языке C++, позволяющий находить безопасные управления для аффинных динамических систем. Он основан на стохастическом методе MPPI (Model Predictive Path Integral) с идеей нахождения параметров распределения семплирования управлений, при которых вероятность того, что элементы управления окажутся безопасными, превышает заранее определённый порог и превосходит существующий метод предотвращения столкновений OCRA (Optimal Reciprocal Collision Avoidance). В рамках эксперимента все алгоритмы успешно справились с поставленной задачей во всех случаях. Как? Читайте в материалах!
Cсылки по теме: