
Второй по счёту беспилотный дайджест прошёл испытание снегопадом и морозами, приземлившись на нашу новостную платформу в самый разгар декабря. Три свежих публикации сотрудников 71 и 75 отделов Института проблем искусственного интеллекта посвящены трём различным задачам навигации наземных и летательных аппаратов и их новейшим решениям, полученным в ходе кропотливых исследований и испытаний.
Так, для журнала IEEE Access Кирилл Муравьёв и Константин Яковлев произвели оценку методов топологического картирования внутри помещений (ссылка), а конкретно Hydra, S-graphs+, IncrementalTopo, ETPNav и TSGM. Зачем? Авторов заинтересовало качество топологического графа — он очень важен для успешного путешествия автономного робота в условиях изоляции от внешнего мира, когда GPS и прочие фокусы уже не действуют, а результат целиком и полностью зависит от встроенных сенсоров.
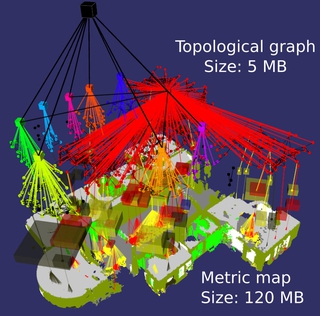
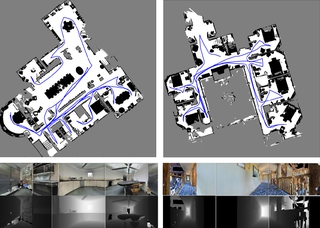
Уникальный подход для измерения близости вершин топологического графа с близким расположением эталонных данных, а также связности, последовательности и эффективности навигации, позволил выявить все плюсы и минусы каждого метода. Тестировали, замеряли и сравнивали агентов в среде симулятора Habitat и 15-ти сценариев из набора Matterport3D при поддержке проекта Минобрнауки № 075-15-2020-799 «Методы построения и моделирования сложных систем на основе интеллектуальных и суперкомпьютерных технологий, направленных на преодоление больших вызовов» (ссылка).
Одновременно Михаил и Вячеслав Хачумовы представили свой дайджест пилотирования мобильных интеллектуальных устройств, уже в рамках гранта РФФИ № 21-71-10056 «Создание моделей и методов интеллектуально-геометрического управления робототехническими системами в недетерминированной среде на основе обработки многомодальной слабоструктурированной информации, представления и автоматического пополнения знаний бортовых решателей» (ссылка).
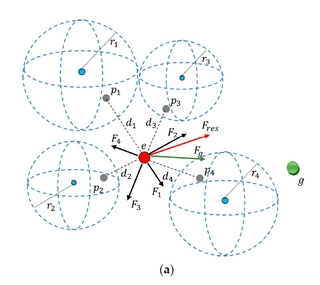
В статье «Моделирование решения задачи преследования-уклонения на основе интеллектуально-геометрической теории управления» (ссылка) для журнала Mathematics издательства MDPI (квартиль Q1 в базе WoS) рассмотрена игра с участием малых, но вёртких БПЛА, удирающих от полчищ врагов в условиях ветровых возмущений и ограниченных вычислительных ресурсов. Собственно, для выработки оптимальной стратегии (уклоняемый должен достичь цели в кротчайшие сроки, преследующий — любой ценой изловить его) и нужен вышеозначенный подход на основе создания окружности или сферы Аполлония, с применением современных принципов интеллектуального, геометрического и автоматического контроля динамических систем.
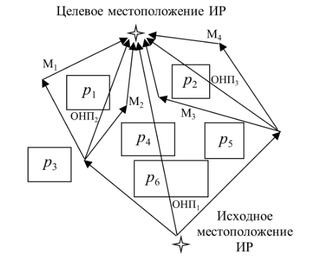
В другом труде для журнала «Автоматика и телемеханика», посвящённом планированию многоэтапной деятельности интеллектуальным роботом в условиях неопределённости (ссылка), Владимир Мелехин и Михаил Хачумов показали актуальность создания подобных агентов различного назначения. Авторы предложили оригинальные по содержанию элементы продукционной модели представления знаний безотносительно к конкретной предметной области, а разработанные ими процедуры автоматического синтеза графа «видимости» позволили формировать локально-оптимальный маршрут целенаправленного перемещения в априори неописанных условиях. Не говоря уже о возможности их использования для вывода решений на семантических сетях. Это и многое другое — в материалах по ссылкам выше.